
一種高端制造中高精度抓取機(jī)械手
作者:
【申請(qǐng)(專利)號(hào): CN202210097322.7;申請(qǐng)權(quán)利人:昌暉;發(fā)明設(shè)計(jì)人: 昌暉;】
摘要:
本發(fā)明公開(kāi)了一種高端制造中高精度抓取機(jī)械手,包括底座、往復(fù)驅(qū)動(dòng)單元、抓取單元和調(diào)節(jié)單元;底座:其上表面通過(guò)工字軌道滑動(dòng)連接有滑動(dòng)座,滑動(dòng)座的上表面設(shè)有機(jī)械臂;往復(fù)驅(qū)動(dòng)單元:包括安裝架、同步輪、電機(jī)一、同步帶和固定組件,所述安裝架設(shè)置于底座的內(nèi)腔底壁面,安裝架的上表面通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有橫向?qū)ΨQ分布的同步輪,兩個(gè)同步輪通過(guò)同步帶傳動(dòng)連接,安裝架的橫向板體下表面右端通過(guò)安裝座設(shè)有電機(jī)一,電機(jī)一的輸出軸上端貫穿安裝架的橫向板體下表面并與右側(cè)的同步輪下端轉(zhuǎn)軸下端面固定連接,該高端制造中高精度抓取機(jī)械手,在抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制,避免了對(duì)工件造成損壞。
主權(quán)項(xiàng):
1.一種高端制造中高精度抓取機(jī)械手,其特征在于:包括底座(1)、往復(fù)驅(qū)動(dòng)單元(3)、抓取單元(5)和調(diào)節(jié)單元(6);底座(1):其上表面通過(guò)工字軌道滑動(dòng)連接有滑動(dòng)座(2),滑動(dòng)座(2)的上表面設(shè)有機(jī)械臂(4);往復(fù)驅(qū)動(dòng)單元(3):包括安裝架(31)、同步輪(32)、電機(jī)一(33)、同步帶(34)和固定組件(35),所述安裝架(31)設(shè)置于底座(1)的內(nèi)腔底壁面,安裝架(31)的上表面通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有橫向?qū)ΨQ分布的同步輪(32),兩個(gè)同步輪(32)通過(guò)同步帶(34)傳動(dòng)連接,安裝架(31)的橫向板體下表面右端通過(guò)安裝座設(shè)有電機(jī)一(33),電機(jī)一(33)的輸出軸上端貫穿安裝架(31)的橫向板體下表面并與右側(cè)的同步輪(32)下端轉(zhuǎn)軸下端面固定連接,同步帶(34)的外表面設(shè)有固定組件(35),固定組件(35)與滑動(dòng)座(2)的下表面固定連接;抓取單元(5):設(shè)置于機(jī)械臂(4)上端前側(cè)安裝塊的左右表面;調(diào)節(jié)單元(6):設(shè)置于抓取單元(5)的內(nèi)部;其中:還包括PLC控制器(7),所述PLC控制器(7)設(shè)置于底座(1)的前表面右側(cè),PLC控制器(7)的輸入端電連接外部電源,機(jī)械臂(4)和電機(jī)一(33)的輸入端均電連接PLC控制器(7)的輸出端。
要求:
1.一種高端制造中高精度抓取機(jī)械手,其特征在于:包括底座(1)、往復(fù)驅(qū)動(dòng)單元(3)、抓取單元(5)和調(diào)節(jié)單元(6);
底座(1):其上表面通過(guò)工字軌道滑動(dòng)連接有滑動(dòng)座(2),滑動(dòng)座(2)的上表面設(shè)有機(jī)械臂(4);
往復(fù)驅(qū)動(dòng)單元(3):包括安裝架(31)、同步輪(32)、電機(jī)一(33)、同步帶(34)和固定組件(35),所述安裝架(31)設(shè)置于底座(1)的內(nèi)腔底壁面,安裝架(31)的上表面通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有橫向?qū)ΨQ分布的同步輪(32),兩個(gè)同步輪(32)通過(guò)同步帶(34)傳動(dòng)連接,安裝架(31)的橫向板體下表面右端通過(guò)安裝座設(shè)有電機(jī)一(33),電機(jī)一(33)的輸出軸上端貫穿安裝架(31)的橫向板體下表面并與右側(cè)的同步輪(32)下端轉(zhuǎn)軸下端面固定連接,同步帶(34)的外表面設(shè)有固定組件(35),固定組件(35)與滑動(dòng)座(2)的下表面固定連接;
抓取單元(5):設(shè)置于機(jī)械臂(4)上端前側(cè)安裝塊的左右表面;
調(diào)節(jié)單元(6):設(shè)置于抓取單元(5)的內(nèi)部;
其中:還包括PLC控制器(7),所述PLC控制器(7)設(shè)置于底座(1)的前表面右側(cè),PLC控制器(7)的輸入端電連接外部電源,機(jī)械臂(4)和電機(jī)一(33)的輸入端均電連接PLC控制器(7)的輸出端。
2.根據(jù)權(quán)利要求1所述的一種高端制造中高精度抓取機(jī)械手,其特征在于:所述固定組件(35)包括固定板(351)和鎖止螺釘(352),所述固定板(351)設(shè)置于滑動(dòng)座(2)的下表面,鎖止螺釘(352)穿過(guò)固定板(351)前表面對(duì)應(yīng)設(shè)置的安裝孔一并與同步帶(34)一側(cè)外表面對(duì)應(yīng)設(shè)置的螺孔二螺紋連接。
3.根據(jù)權(quán)利要求1所述的一種高端制造中高精度抓取機(jī)械手,其特征在于:所述抓取單元(5)包括防護(hù)罩(51)、花齒桿(52)、齒輪(53)、夾板(54)、壓力傳感器(55)和抓取驅(qū)動(dòng)組件(56),所述防護(hù)罩(51)對(duì)稱設(shè)置于機(jī)械臂(4)上端前側(cè)安裝塊的左右表面,兩個(gè)防護(hù)罩(51)之間前端通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有豎向?qū)ΨQ分布的花齒桿(52),花齒桿(52)的左右倆端均滑動(dòng)連接有齒輪(53),齒輪(53)的外弧面均設(shè)有夾板(54),夾板(54)的前表面均設(shè)有壓力傳感器(55),兩個(gè)防護(hù)罩(51)之間中部設(shè)有抓取驅(qū)動(dòng)組件(56),抓取驅(qū)動(dòng)組件(56)分別與相鄰的齒輪(53)嚙合連接,壓力傳感器(55)的輸出端電連接PLC控制器(7)的輸入端。
4.根據(jù)權(quán)利要求3所述的一種高端制造中高精度抓取機(jī)械手,其特征在于:所述抓取驅(qū)動(dòng)組件(56)包括齒型桿(561)和電機(jī)二(562),所述齒型桿(561)通過(guò)轉(zhuǎn)軸豎向?qū)ΨQ轉(zhuǎn)動(dòng)連接于兩個(gè)防護(hù)罩(51)之間中部,兩個(gè)齒型桿(561)嚙合連接,上端橫向相鄰的兩個(gè)齒輪(53)均與上端的齒型桿(561)嚙合連接,下端橫向相鄰的兩個(gè)齒輪(53)均與下端的齒型桿(561)嚙合連接,右端的防護(hù)罩(51)右表面下端通過(guò)安裝座設(shè)有電機(jī)二(562),電機(jī)二(562)的輸出軸左端貫穿右端的防護(hù)罩(51)右表面并與下端的齒型桿(561)右側(cè)轉(zhuǎn)軸右端面固定連接,電機(jī)二(562)的輸入端電連接PLC控制器(7)的輸出端。
5.根據(jù)權(quán)利要求3所述的一種高端制造中高精度抓取機(jī)械手,其特征在于:所述調(diào)節(jié)單元(6)包括固定塊(61)和雙向絲桿(62),所述固定塊(61)分別對(duì)稱設(shè)置于花齒桿(52)的左右端,橫向相鄰的兩個(gè)固定塊(61)之間均通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有雙向絲桿(62),雙向絲桿(62)分別與同一高度的齒輪(53)邊緣處對(duì)應(yīng)設(shè)置的螺孔三螺紋連接。
6.根據(jù)權(quán)利要求5所述的一種高端制造中高精度抓取機(jī)械手,其特征在于:所述調(diào)節(jié)單元(6)還包括操作鈕(63)和鎖止螺栓(64),所述操作鈕(63)分別設(shè)置于雙向絲桿(62)的左端,操作鈕(63)右端面設(shè)置的鎖止孔內(nèi)均螺紋連接有鎖止螺栓(64),鎖止螺栓(64)的左端均與左端的防護(hù)罩(51)的內(nèi)腔右壁面抵觸。
7.根據(jù)權(quán)利要求1所述的一種高端制造中高精度抓取機(jī)械手,其特征在于:所述滑動(dòng)座(2)的左右表面設(shè)有對(duì)稱分布的清理板(8),清理板(8)的下表面均設(shè)有均勻分布的清理毛刷(9)。
一種高端制造中高精度抓取機(jī)械手
技術(shù)領(lǐng)域
本發(fā)明涉及機(jī)械手技術(shù)領(lǐng)域,具體為一種高端制造中高精度抓取機(jī)械手。
背景技術(shù)
機(jī)械手是指能模仿人手和臂的某些動(dòng)作功能,用以按固定程序抓取、搬運(yùn)物件或操作工具的自動(dòng)操作裝置,機(jī)械手是最早出現(xiàn)的工業(yè)機(jī)器人,也是最早出現(xiàn)的現(xiàn)代機(jī)器人,它可代替人的繁重勞動(dòng)以實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動(dòng)化,能在有害環(huán)境下操作以保護(hù)人身安全,因而廣泛應(yīng)用于機(jī)械制造、冶金、電子、輕工和原子能等部門,現(xiàn)有技術(shù)中:授權(quán)公布號(hào)CN 206383138 U的專利公開(kāi)了涉及一種高精度機(jī)械手抓取裝置,包括底座、升降氣缸、橫向推動(dòng)裝置和升降大臂,所述底座頂部固定連接支撐架,所述支撐架內(nèi)部設(shè)有基座,所述基座兩側(cè)設(shè)有固定板,所述基座頂部設(shè)有升降氣缸,所述升降氣缸內(nèi)部設(shè)有升降桿,所述升降氣缸頂部連接橫向推動(dòng)裝置,但這種方式,傳動(dòng)的精度不夠高,抓取物件時(shí)力度的大小不能夠得到精準(zhǔn)的控制,會(huì)對(duì)工件造成損壞,在對(duì)不同規(guī)格的產(chǎn)品夾持時(shí)需要更換不同部件,為此,我們提出一種高端制造中高精度抓取機(jī)械手。
發(fā)明內(nèi)容
本發(fā)明要解決的技術(shù)問(wèn)題是克服現(xiàn)有的缺陷,提供一種高端制造中高精度抓取機(jī)械手,使得抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制,可以有效解決背景技術(shù)中的問(wèn)題。
為實(shí)現(xiàn)上述目的,本發(fā)明提供如下技術(shù)方案:一種高端制造中高精度抓取機(jī)械手,包括底座、往復(fù)驅(qū)動(dòng)單元、抓取單元和調(diào)節(jié)單元;
底座:其上表面通過(guò)工字軌道滑動(dòng)連接有滑動(dòng)座,滑動(dòng)座的上表面設(shè)有機(jī)械臂;
往復(fù)驅(qū)動(dòng)單元:包括安裝架、同步輪、電機(jī)一、同步帶和固定組件,所述安裝架設(shè)置于底座的內(nèi)腔底壁面,安裝架的上表面通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有橫向?qū)ΨQ分布的同步輪,兩個(gè)同步輪通過(guò)同步帶傳動(dòng)連接,安裝架的橫向板體下表面右端通過(guò)安裝座設(shè)有電機(jī)一,電機(jī)一的輸出軸上端貫穿安裝架的橫向板體下表面并與右側(cè)的同步輪下端轉(zhuǎn)軸下端面固定連接,同步帶的外表面設(shè)有固定組件,固定組件與滑動(dòng)座的下表面固定連接;
抓取單元:設(shè)置于機(jī)械臂上端前側(cè)安裝塊的左右表面;
調(diào)節(jié)單元:設(shè)置于抓取單元的內(nèi)部;
其中:還包括PLC控制器,所述PLC控制器設(shè)置于底座的前表面右側(cè),PLC控制器的輸入端電連接外部電源,機(jī)械臂和電機(jī)一的輸入端均電連接PLC控制器的輸出端,提高配機(jī)械手的傳動(dòng)精度,使得抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制,達(dá)到了高精準(zhǔn)抓取的目的,避免了對(duì)工件造成損壞,能夠?qū)Σ煌?guī)格的產(chǎn)品進(jìn)行夾持,提高了實(shí)用性。
進(jìn)一步的,所述固定組件包括固定板和鎖止螺釘,所述固定板設(shè)置于滑動(dòng)座的下表面,鎖止螺釘穿過(guò)固定板前表面對(duì)應(yīng)設(shè)置的安裝孔一并與同步帶一側(cè)外表面對(duì)應(yīng)設(shè)置的螺孔二螺紋連接,起到快速連接的作用。
進(jìn)一步的,所述抓取單元包括防護(hù)罩、花齒桿、齒輪、夾板、壓力傳感器和抓取驅(qū)動(dòng)組件,所述防護(hù)罩對(duì)稱設(shè)置于機(jī)械臂上端前側(cè)安裝塊的左右表面,兩個(gè)防護(hù)罩之間前端通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有豎向?qū)ΨQ分布的花齒桿,花齒桿的左右倆端均滑動(dòng)連接有齒輪,齒輪的外弧面均設(shè)有夾板,夾板的前表面均設(shè)有壓力傳感器,兩個(gè)防護(hù)罩之間中部設(shè)有抓取驅(qū)動(dòng)組件,抓取驅(qū)動(dòng)組件分別與相鄰的齒輪嚙合連接,壓力傳感器的輸出端電連接PLC控制器的輸入端,使得抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制。
進(jìn)一步的,所述抓取驅(qū)動(dòng)組件包括齒型桿和電機(jī)二,所述齒型桿通過(guò)轉(zhuǎn)軸豎向?qū)ΨQ轉(zhuǎn)動(dòng)連接于兩個(gè)防護(hù)罩之間中部,兩個(gè)齒型桿嚙合連接,上端橫向相鄰的兩個(gè)齒輪均與上端的齒型桿嚙合連接,下端橫向相鄰的兩個(gè)齒輪均與下端的齒型桿嚙合連接,右端的防護(hù)罩右表面下端通過(guò)安裝座設(shè)有電機(jī)二,電機(jī)二的輸出軸左端貫穿右端的防護(hù)罩右表面并與下端的齒型桿右側(cè)轉(zhuǎn)軸右端面固定連接,電機(jī)二的輸入端電連接PLC控制器的輸出端,達(dá)到了高效驅(qū)動(dòng)的目的。
進(jìn)一步的,所述調(diào)節(jié)單元包括固定塊和雙向絲桿,所述固定塊分別對(duì)稱設(shè)置于花齒桿的左右端,橫向相鄰的兩個(gè)固定塊之間均通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有雙向絲桿,雙向絲桿分別與同一高度的齒輪邊緣處對(duì)應(yīng)設(shè)置的螺孔三螺紋連接,提高了實(shí)用性。
進(jìn)一步的,所述調(diào)節(jié)單元還包括操作鈕和鎖止螺栓,所述操作鈕分別設(shè)置于雙向絲桿的左端,操作鈕右端面設(shè)置的鎖止孔內(nèi)均螺紋連接有鎖止螺栓,鎖止螺栓的左端均與左端的防護(hù)罩的內(nèi)腔右壁面抵觸,對(duì)雙向絲桿進(jìn)行限位。
進(jìn)一步的,所述滑動(dòng)座的左右表面設(shè)有對(duì)稱分布的清理板,清理板的下表面均設(shè)有均勻分布的清理毛刷,提高配機(jī)械手的傳動(dòng)精度。
與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果是:本高端制造中高精度抓取機(jī)械手,具有以下好處:
1、首先工作人員將鎖止螺釘依次穿過(guò)固定板并與固定板的外表面連接,然后根據(jù)移動(dòng)的需求,通過(guò)PLC控制器調(diào)控電機(jī)一運(yùn)作,由于兩個(gè)同步輪通過(guò)同步帶傳動(dòng)連接,當(dāng)電機(jī)一帶動(dòng)右端的同步輪轉(zhuǎn)動(dòng)時(shí),同步帶動(dòng)同步帶移動(dòng),且與左側(cè)的同步輪配合,帶動(dòng)滑動(dòng)座及其附屬機(jī)構(gòu)沿底座上表面的工字軌道同步移動(dòng),從而滿足了移動(dòng)抓取的需求,大大增加機(jī)械手抓取的范圍,當(dāng)需要反向移動(dòng)時(shí),只需通過(guò)滑動(dòng)座調(diào)控電機(jī)一反轉(zhuǎn)即可,而清理板與清理毛刷配合對(duì)底座上表面的工字軌道進(jìn)行清理,提高配機(jī)械手的傳動(dòng)精度。
2、在抓取時(shí)工件時(shí),首先通過(guò)PLC控制器調(diào)控機(jī)械臂移動(dòng)至抓取場(chǎng)所,然后調(diào)控電機(jī)二運(yùn)作,電機(jī)二輸出軸逆時(shí)針旋轉(zhuǎn)帶動(dòng)下端的齒型桿逆時(shí)針轉(zhuǎn)動(dòng),由于兩個(gè)齒型桿嚙合連接,上端橫向相鄰的兩個(gè)齒輪均與上端的齒型桿嚙合連接,下端橫向相鄰的兩個(gè)齒輪均與下端的齒型桿嚙合連接,當(dāng)下端的齒型桿逆時(shí)針轉(zhuǎn)動(dòng),上端的齒型桿同步反向轉(zhuǎn)動(dòng),此時(shí)兩個(gè)齒型桿則帶動(dòng)對(duì)應(yīng)的齒輪同步反方向旋轉(zhuǎn),此時(shí)豎向相鄰的齒輪則會(huì)帶著對(duì)應(yīng)的夾板相互靠近,從而將工件抓取柱,由于壓力傳感器實(shí)時(shí)檢測(cè)壓力信息且將信息同步給壓力傳感器,然后由壓力傳感器進(jìn)行判定,當(dāng)壓力大于內(nèi)部?jī)?chǔ)存的最大數(shù)值時(shí),PLC控制器調(diào)控電機(jī)二停止運(yùn)作,然后再次調(diào)控機(jī)械臂運(yùn)作,將抓取的工件移動(dòng)至指定場(chǎng)所,使得抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制,達(dá)到了高精準(zhǔn)抓取的目的,避免了對(duì)工件造成損壞。
3、當(dāng)應(yīng)對(duì)不用類型工件抓取需要調(diào)節(jié)時(shí),工作人員依次逆時(shí)針旋轉(zhuǎn)鎖止螺栓,使得鎖止螺栓與左端的防護(hù)罩的內(nèi)腔右壁面分離,然后通過(guò)操作鈕轉(zhuǎn)動(dòng)雙向絲桿,雙向絲桿轉(zhuǎn)動(dòng)使得對(duì)應(yīng)的兩個(gè)齒輪同時(shí)沿花齒桿的軸向方向同時(shí)相反或相向靠近,依次來(lái)調(diào)節(jié)橫向兩個(gè)齒輪之間的間距,以此適應(yīng)不同大小工件的抓取,能夠?qū)Σ煌?guī)格的產(chǎn)品進(jìn)行夾持,提高了實(shí)用性,調(diào)節(jié)完成之后工作人員將逆時(shí)針旋轉(zhuǎn)鎖止螺栓,使得鎖止螺栓的左端與左端的防護(hù)罩的內(nèi)腔右壁面重新抵觸,以此對(duì)雙向絲桿進(jìn)行限位。
附圖說(shuō)明
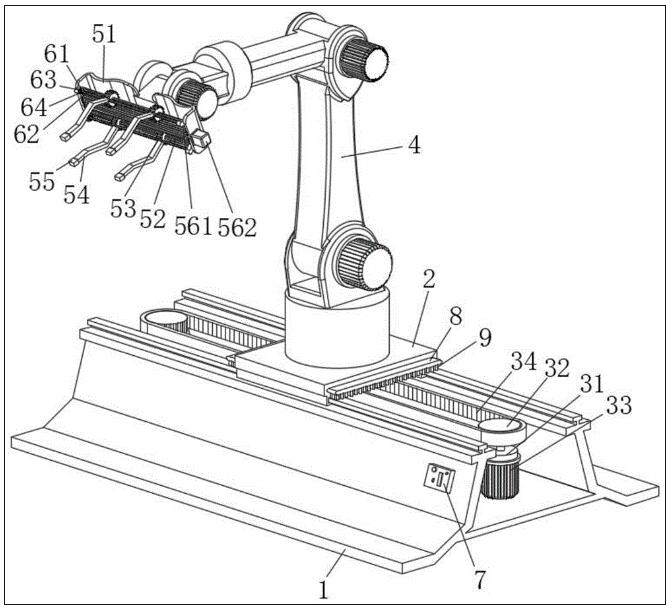
圖1為本發(fā)明結(jié)構(gòu)示意圖;
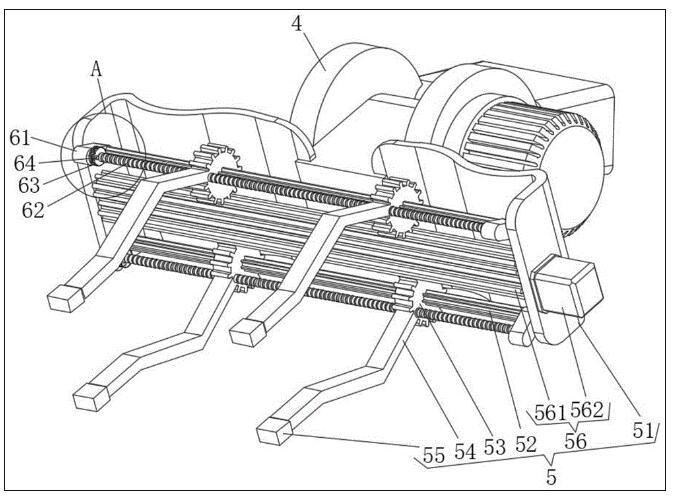
圖2為本發(fā)明抓取單元的結(jié)構(gòu)示意圖;
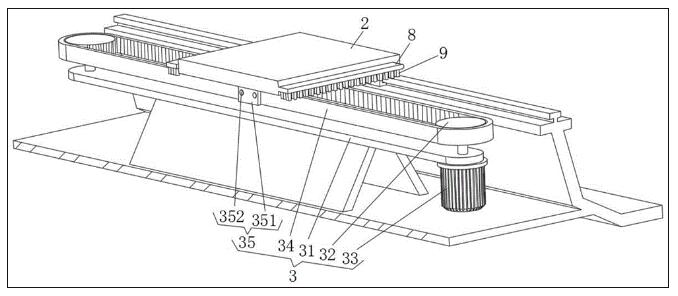
圖3為本發(fā)明往復(fù)驅(qū)動(dòng)單元的結(jié)構(gòu)示意圖;
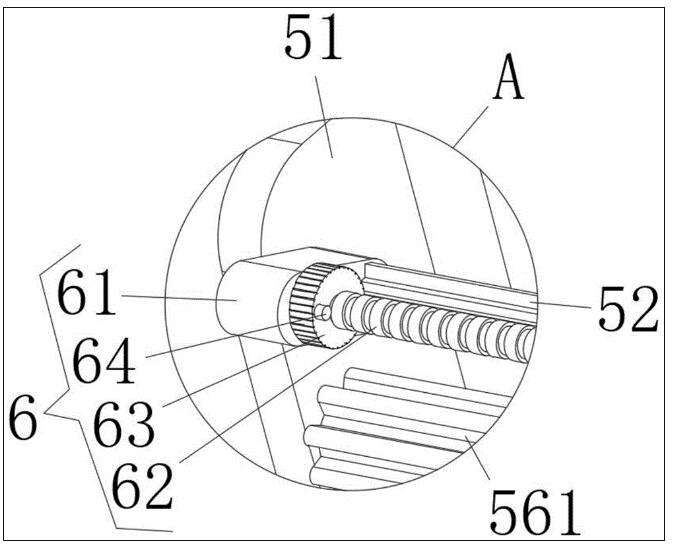
圖4為本發(fā)明A處放大結(jié)構(gòu)示意圖。
圖中:1底座、2滑動(dòng)座、3往復(fù)驅(qū)動(dòng)單元、31安裝架、32同步輪、33電機(jī)一、34同步帶、35固定組件、351固定板、352鎖止螺釘、4機(jī)械臂、5抓取單元、51防護(hù)罩、52花齒桿、53齒輪、54夾板、55壓力傳感器、56抓取驅(qū)動(dòng)組件、561齒型桿、562電機(jī)二、6調(diào)節(jié)單元、61固定塊、62雙向絲桿、63操作鈕、64鎖止螺栓、7 PLC控制器、8清理板、9清理毛刷。
具體實(shí)施方式
下面將結(jié)合本發(fā)明實(shí)施例中的附圖,對(duì)本發(fā)明實(shí)施例中的技術(shù)方案進(jìn)行清楚、完整地描述,顯然,所描述的實(shí)施例僅僅是本發(fā)明一部分實(shí)施例,而不是全部的實(shí)施例。基于本發(fā)明中的實(shí)施例,本領(lǐng)域普通技術(shù)人員在沒(méi)有做出創(chuàng)造性勞動(dòng)前提下所獲得的所有其他實(shí)施例,都屬于本發(fā)明保護(hù)的范圍。
請(qǐng)參閱圖1-4,本發(fā)明提供以下技術(shù)方案:
實(shí)施例一:一種高端制造中高精度抓取機(jī)械手,包括底座1、往復(fù)驅(qū)動(dòng)單元3、抓取單元5和調(diào)節(jié)單元6;
底座1:底座1對(duì)其附屬機(jī)構(gòu)單元提供安裝支撐場(chǎng)所,其上表面通過(guò)工字軌道滑動(dòng)連接有滑動(dòng)座2,滑動(dòng)座2起到往復(fù)滑動(dòng)的作用,滑動(dòng)座2的上表面設(shè)有機(jī)械臂4,起到多軸移動(dòng)的作用;
往復(fù)驅(qū)動(dòng)單元3:包括安裝架31、同步輪32、電機(jī)一33、同步帶34和固定組件35,安裝架31設(shè)置于底座1的內(nèi)腔底壁面,安裝架31的上表面通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有橫向?qū)ΨQ分布的同步輪32,兩個(gè)同步輪32通過(guò)同步帶34傳動(dòng)連接,安裝架31的橫向板體下表面右端通過(guò)安裝座設(shè)有電機(jī)一33,電機(jī)一33的輸出軸上端貫穿安裝架31的橫向板體下表面并與右側(cè)的同步輪32下端轉(zhuǎn)軸下端面固定連接,同步帶34的外表面設(shè)有固定組件35,固定組件35與滑動(dòng)座2的下表面固定連接,固定組件35包括固定板351和鎖止螺釘352,固定板351設(shè)置于滑動(dòng)座2的下表面,鎖止螺釘352穿過(guò)固定板351前表面對(duì)應(yīng)設(shè)置的安裝孔一并與同步帶34一側(cè)外表面對(duì)應(yīng)設(shè)置的螺孔二螺紋連接,滑動(dòng)座2的左右表面設(shè)有對(duì)稱分布的清理板8,清理板8的下表面均設(shè)有均勻分布的清理毛刷9;
抓取單元5:設(shè)置于機(jī)械臂4上端前側(cè)安裝塊的左右表面;
調(diào)節(jié)單元6:設(shè)置于抓取單元5的內(nèi)部;
其中:還包括PLC控制器7,PLC控制器7設(shè)置于底座1的前表面右側(cè),PLC控制器7的輸入端電連接外部電源,機(jī)械臂4和電機(jī)一33的輸入端均電連接PLC控制器7的輸出端。
具體的,這樣設(shè)置,首先工作人員將鎖止螺釘352依次穿過(guò)固定板351并與固定板351的外表面連接,然后根據(jù)移動(dòng)的需求,通過(guò)PLC控制器7調(diào)控電機(jī)一33運(yùn)作,由于兩個(gè)同步輪32通過(guò)同步帶34傳動(dòng)連接,當(dāng)電機(jī)一33帶動(dòng)右端的同步輪32轉(zhuǎn)動(dòng)時(shí),同步帶動(dòng)同步帶34移動(dòng),且與左側(cè)的同步輪32配合,帶動(dòng)滑動(dòng)座2及其附屬機(jī)構(gòu)沿底座1上表面的工字軌道同步移動(dòng),從而滿足了移動(dòng)抓取的需求,大大增加機(jī)械手抓取的范圍,當(dāng)需要反向移動(dòng)時(shí),只需通過(guò)滑動(dòng)座2調(diào)控電機(jī)一33反轉(zhuǎn)即可,而清理板8與清理毛刷9配合對(duì)底座1上表面的工字軌道進(jìn)行清理,提高配機(jī)械手的傳動(dòng)精度。
實(shí)施例二:
本實(shí)施例與實(shí)施例一的區(qū)別在于:
本實(shí)施例中,抓取單元5包括防護(hù)罩51、花齒桿52、齒輪53、夾板54、壓力傳感器55和抓取驅(qū)動(dòng)組件56,防護(hù)罩51對(duì)稱設(shè)置于機(jī)械臂4上端前側(cè)安裝塊的左右表面,兩個(gè)防護(hù)罩51之間前端通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有豎向?qū)ΨQ分布的花齒桿52,花齒桿52的左右倆端均滑動(dòng)連接有齒輪53,齒輪53的外弧面均設(shè)有夾板54,夾板54的前表面均設(shè)有壓力傳感器55,兩個(gè)防護(hù)罩51之間中部設(shè)有抓取驅(qū)動(dòng)組件56,抓取驅(qū)動(dòng)組件56分別與相鄰的齒輪53嚙合連接,壓力傳感器55的輸出端電連接PLC控制器7的輸入端,抓取驅(qū)動(dòng)組件56包括齒型桿561和電機(jī)二562,齒型桿561通過(guò)轉(zhuǎn)軸豎向?qū)ΨQ轉(zhuǎn)動(dòng)連接于兩個(gè)防護(hù)罩51之間中部,兩個(gè)齒型桿561嚙合連接,上端橫向相鄰的兩個(gè)齒輪53均與上端的齒型桿561嚙合連接,下端橫向相鄰的兩個(gè)齒輪53均與下端的齒型桿561嚙合連接,右端的防護(hù)罩51右表面下端通過(guò)安裝座設(shè)有電機(jī)二562,電機(jī)二562的輸出軸左端貫穿右端的防護(hù)罩51右表面并與下端的齒型桿561右側(cè)轉(zhuǎn)軸右端面固定連接,電機(jī)二562的輸入端電連接PLC控制器7的輸出端。
具體的,這樣設(shè)置,在抓取時(shí)工件時(shí),首先通過(guò)PLC控制器7調(diào)控機(jī)械臂4移動(dòng)至抓取場(chǎng)所,然后調(diào)控電機(jī)二562運(yùn)作,電機(jī)二562輸出軸逆時(shí)針旋轉(zhuǎn)帶動(dòng)下端的齒型桿561逆時(shí)針轉(zhuǎn)動(dòng),由于兩個(gè)齒型桿561嚙合連接,上端橫向相鄰的兩個(gè)齒輪53均與上端的齒型桿561嚙合連接,下端橫向相鄰的兩個(gè)齒輪53均與下端的齒型桿561嚙合連接,當(dāng)下端的齒型桿561逆時(shí)針轉(zhuǎn)動(dòng),上端的齒型桿561同步反向轉(zhuǎn)動(dòng),此時(shí)兩個(gè)齒型桿561則帶動(dòng)對(duì)應(yīng)的齒輪53同步反方向旋轉(zhuǎn),此時(shí)豎向相鄰的齒輪53則會(huì)帶著對(duì)應(yīng)的夾板54相互靠近,從而將工件抓取柱,由于壓力傳感器55實(shí)時(shí)檢測(cè)壓力信息且將信息同步給壓力傳感器55,然后由壓力傳感器55進(jìn)行判定,當(dāng)壓力大于內(nèi)部?jī)?chǔ)存的最大數(shù)值時(shí),PLC控制器7調(diào)控電機(jī)二562停止運(yùn)作,然后再次調(diào)控機(jī)械臂4運(yùn)作,將抓取的工件移動(dòng)至指定場(chǎng)所,使得抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制,達(dá)到了高精準(zhǔn)抓取的目的,避免了對(duì)工件造成損壞。
實(shí)施例三:
本實(shí)施例與實(shí)施例一的區(qū)別在于:
本實(shí)施例中,調(diào)節(jié)單元6包括固定塊61和雙向絲桿62,固定塊61分別對(duì)稱設(shè)置于花齒桿52的左右端,橫向相鄰的兩個(gè)固定塊61之間均通過(guò)轉(zhuǎn)軸轉(zhuǎn)動(dòng)連接有雙向絲桿62,雙向絲桿62分別與同一高度的齒輪53邊緣處對(duì)應(yīng)設(shè)置的螺孔三螺紋連接,調(diào)節(jié)單元6還包括操作鈕63和鎖止螺栓64,操作鈕63分別設(shè)置于雙向絲桿62的左端,操作鈕63右端面設(shè)置的鎖止孔內(nèi)均螺紋連接有鎖止螺栓64,鎖止螺栓64的左端均與左端的防護(hù)罩51的內(nèi)腔右壁面抵觸。
具體的,這樣設(shè)置,當(dāng)應(yīng)對(duì)不用類型工件抓取需要調(diào)節(jié)時(shí),工作人員依次逆時(shí)針旋轉(zhuǎn)鎖止螺栓64,使得鎖止螺栓64與左端的防護(hù)罩51的內(nèi)腔右壁面分離,然后通過(guò)操作鈕63轉(zhuǎn)動(dòng)雙向絲桿62,雙向絲桿62轉(zhuǎn)動(dòng)使得對(duì)應(yīng)的兩個(gè)齒輪53同時(shí)沿花齒桿52的軸向方向同時(shí)相反或相向靠近,依次來(lái)調(diào)節(jié)橫向兩個(gè)齒輪53之間的間距,以此適應(yīng)不同大小工件的抓取,能夠?qū)Σ煌?guī)格的產(chǎn)品進(jìn)行夾持,提高了實(shí)用性,調(diào)節(jié)完成之后工作人員將逆時(shí)針旋轉(zhuǎn)鎖止螺栓64,使得鎖止螺栓64的左端與左端的防護(hù)罩51的內(nèi)腔右壁面重新抵觸,以此對(duì)雙向絲桿62進(jìn)行限位。
本發(fā)明提供的一種高端制造中高精度抓取機(jī)械手的工作原理如下:首先工作人員將鎖止螺釘352依次穿過(guò)固定板351并與固定板351的外表面連接,然后根據(jù)移動(dòng)的需求,通過(guò)PLC控制器7調(diào)控電機(jī)一33運(yùn)作,由于兩個(gè)同步輪32通過(guò)同步帶34傳動(dòng)連接,當(dāng)電機(jī)一33帶動(dòng)右端的同步輪32轉(zhuǎn)動(dòng)時(shí),同步帶動(dòng)同步帶34移動(dòng),且與左側(cè)的同步輪32配合,帶動(dòng)滑動(dòng)座2及其附屬機(jī)構(gòu)沿底座1上表面的工字軌道同步移動(dòng),從而滿足了移動(dòng)抓取的需求,大大增加機(jī)械手抓取的范圍,當(dāng)需要反向移動(dòng)時(shí),只需通過(guò)滑動(dòng)座2調(diào)控電機(jī)一33反轉(zhuǎn)即可,而清理板8與清理毛刷9配合對(duì)底座1上表面的工字軌道進(jìn)行清理,提高配機(jī)械手的傳動(dòng)精度,在抓取時(shí)工件時(shí),首先通過(guò)PLC控制器7調(diào)控機(jī)械臂4移動(dòng)至抓取場(chǎng)所,然后調(diào)控電機(jī)二562運(yùn)作,電機(jī)二562輸出軸逆時(shí)針旋轉(zhuǎn)帶動(dòng)下端的齒型桿561逆時(shí)針轉(zhuǎn)動(dòng),由于兩個(gè)齒型桿561嚙合連接,上端橫向相鄰的兩個(gè)齒輪53均與上端的齒型桿561嚙合連接,下端橫向相鄰的兩個(gè)齒輪53均與下端的齒型桿561嚙合連接,當(dāng)下端的齒型桿561逆時(shí)針轉(zhuǎn)動(dòng),上端的齒型桿561同步反向轉(zhuǎn)動(dòng),此時(shí)兩個(gè)齒型桿561則帶動(dòng)對(duì)應(yīng)的齒輪53同步反方向旋轉(zhuǎn),此時(shí)豎向相鄰的齒輪53則會(huì)帶著對(duì)應(yīng)的夾板54相互靠近,從而將工件抓取柱,由于壓力傳感器55實(shí)時(shí)檢測(cè)壓力信息且將信息同步給壓力傳感器55,然后由壓力傳感器55進(jìn)行判定,當(dāng)壓力大于內(nèi)部?jī)?chǔ)存的最大數(shù)值時(shí),PLC控制器7調(diào)控電機(jī)二562停止運(yùn)作,然后再次調(diào)控機(jī)械臂4運(yùn)作,將抓取的工件移動(dòng)至指定場(chǎng)所,使得抓取物件時(shí)力度的大小能夠得到精準(zhǔn)的控制,達(dá)到了高精準(zhǔn)抓取的目的,避免了對(duì)工件造成損壞,當(dāng)應(yīng)對(duì)不用類型工件抓取需要調(diào)節(jié)時(shí),工作人員依次逆時(shí)針旋轉(zhuǎn)鎖止螺栓64,使得鎖止螺栓64與左端的防護(hù)罩51的內(nèi)腔右壁面分離,然后通過(guò)操作鈕63轉(zhuǎn)動(dòng)雙向絲桿62,雙向絲桿62轉(zhuǎn)動(dòng)使得對(duì)應(yīng)的兩個(gè)齒輪53同時(shí)沿花齒桿52的軸向方向同時(shí)相反或相向靠近,在此過(guò)程中齒輪53的齒牙與齒型桿561的齒槽相對(duì)滑動(dòng)不脫離,依次來(lái)調(diào)節(jié)橫向兩個(gè)齒輪53之間的間距,以此適應(yīng)不同大小工件的抓取,能夠?qū)Σ煌?guī)格的產(chǎn)品進(jìn)行夾持,提高了實(shí)用性,調(diào)節(jié)完成之后工作人員將逆時(shí)針旋轉(zhuǎn)鎖止螺栓64,使得鎖止螺栓64的左端與左端的防護(hù)罩51的內(nèi)腔右壁面重新抵觸,以此對(duì)雙向絲桿62進(jìn)行限位。
值得注意的是,以上實(shí)施例中所公開(kāi)的PLC控制器7核心芯片選用的是PLC單片機(jī),具體型號(hào)為S7-200,機(jī)械臂4、電機(jī)一33、壓力傳感器55和電機(jī)二562則可根據(jù)實(shí)際應(yīng)用場(chǎng)景自由配置,機(jī)械臂4可選用型號(hào)為GC-4FMA4V5/FS3-SMP4S4的機(jī)械臂,電機(jī)一33可選用型號(hào)為180M-21520C5-E的電機(jī),壓力傳感器55可選用型號(hào)為SI4-G@500g的壓力傳感器,電機(jī)二562可選用型號(hào)為130M-09520C5-E的電機(jī),PLC控制器7控制引機(jī)械臂4、電機(jī)一33、壓力傳感器55和電機(jī)二562工作采用現(xiàn)有技術(shù)中常用的方法。
盡管已經(jīng)示出和描述了本發(fā)明的實(shí)施例,對(duì)于本領(lǐng)域的普通技術(shù)人員而言,可以理解在不脫離本發(fā)明的原理和精神的情況下可以對(duì)這些實(shí)施例進(jìn)行多種變化、修改、替換和變型,本發(fā)明的范圍由所附權(quán)利要求及其等同物限定。
推薦新聞

© 2022 寧波鄞州蓋奇同步帶輪有限公司 版權(quán)所有 浙ICP備09102982號(hào)-2  浙公網(wǎng)安備33021202003319號(hào) 網(wǎng)站建設(shè):中企動(dòng)力 寧波 SEO
浙公網(wǎng)安備33021202003319號(hào) 網(wǎng)站建設(shè):中企動(dòng)力 寧波 SEO
咨詢
E-mail
二維碼
手機(jī)瀏覽

- TOP