
一種三維激光切割頭隨動(dòng)裝置
作者:
申請(qǐng)權(quán)利人:中國(guó)航空制造技術(shù)研究院
一種三維激光切割頭隨動(dòng)裝置
【申請(qǐng)公布號(hào):CN115383291A;申請(qǐng)權(quán)利人:中國(guó)航空制造技術(shù)研究院;發(fā)明設(shè)計(jì)人: 馬鎮(zhèn); 左從進(jìn); 聶瑞濤; 王菲;】
摘要:
本發(fā)明涉及激光切割技術(shù)領(lǐng)域,尤其涉及一種三維激光切割頭隨動(dòng)裝置。該裝置包括驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座、直線導(dǎo)軌副、滑動(dòng)組件、距離檢測(cè)器、同步帶輪、同步帶惰輪及同步帶;直線導(dǎo)軌副固定在直線導(dǎo)軌副安裝座上,滑動(dòng)組件可滑動(dòng)地設(shè)置在直線導(dǎo)軌副上;驅(qū)動(dòng)電機(jī)的輸出端與同步帶輪連接,同步帶環(huán)繞于同步帶輪和同步帶惰輪上;滑動(dòng)組件與同步帶連接,且在同步帶的帶動(dòng)下做直線運(yùn)動(dòng);通過距離檢測(cè)器和噴嘴在同步帶的帶動(dòng)下延直線導(dǎo)軌做直線運(yùn)動(dòng),以實(shí)現(xiàn)隨動(dòng)調(diào)高,這種方式中同步帶輪的結(jié)構(gòu),自身的重量較輕,可降低自身的運(yùn)動(dòng)慣量,提高其響應(yīng)速度,且整體結(jié)構(gòu)簡(jiǎn)單,緊湊,制造方便,對(duì)安裝精度要求不高。
主權(quán)項(xiàng):
1.一種三維激光切割頭隨動(dòng)裝置,其特征在于,包括驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座、直線導(dǎo)軌副、滑動(dòng)組件、距離檢測(cè)器、同步帶輪、同步帶惰輪及同步帶;驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座均安裝在三維切割頭擺動(dòng)軸上,直線導(dǎo)軌副固定在直線導(dǎo)軌副安裝座上,滑動(dòng)組件可滑動(dòng)地設(shè)置在直線導(dǎo)軌副上;驅(qū)動(dòng)電機(jī)的輸出端與同步帶輪連接,同步帶環(huán)繞于同步帶輪和同步帶惰輪上;滑動(dòng)組件與同步帶連接,且在同步帶的帶動(dòng)下做直線運(yùn)動(dòng);滑動(dòng)組件的下端與距離檢測(cè)器連接。
要求:
1.一種三維激光切割頭隨動(dòng)裝置,其特征在于,包括驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座、直線導(dǎo)軌副、滑動(dòng)組件、距離檢測(cè)器、同步帶輪、同步帶惰輪及同步帶;驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座均安裝在三維切割頭擺動(dòng)軸上,直線導(dǎo)軌副固定在直線導(dǎo)軌副安裝座上,滑動(dòng)組件可滑動(dòng)地設(shè)置在直線導(dǎo)軌副上;驅(qū)動(dòng)電機(jī)的輸出端與同步帶輪連接,同步帶環(huán)繞于同步帶輪和同步帶惰輪上;滑動(dòng)組件與同步帶連接,且在同步帶的帶動(dòng)下做直線運(yùn)動(dòng);滑動(dòng)組件的下端與距離檢測(cè)器連接。
2.如權(quán)利要求1所述的三維激光切割頭隨動(dòng)裝置,其特征在于,還包括力矩電機(jī)水冷外殼,所述驅(qū)動(dòng)電機(jī)為力矩電機(jī),力矩電機(jī)和直線導(dǎo)軌副安裝座通過力矩電機(jī)水冷外殼安裝在三維切割頭擺動(dòng)軸上。
3.如權(quán)利要求2所述的三維激光切割頭隨動(dòng)裝置,其特征在于,所述滑動(dòng)組件包括左滑動(dòng)單元和右滑動(dòng)單元,左滑動(dòng)單元和右滑動(dòng)單元的下端固定連接有安裝基板,所述距離檢測(cè)器設(shè)置在安裝基板的下方。
4.如權(quán)利要求3所述的三維激光切割頭隨動(dòng)裝置,其特征在于,所述同步帶為開環(huán)同步帶,所述同步帶的兩個(gè)移動(dòng)端分別與所述左滑動(dòng)單元和右滑動(dòng)單元連接。
5.如權(quán)利要求4所述的三維激光切割頭隨動(dòng)裝置,其特征在于,所述同步帶呈“S”環(huán)繞在同步帶輪和同步帶惰輪上,在力矩電機(jī)的驅(qū)動(dòng)下,同步帶的兩個(gè)移動(dòng)端同時(shí)朝向一個(gè)方向移動(dòng),以帶動(dòng)左滑動(dòng)單元和右滑動(dòng)單元同時(shí)直線移動(dòng)。
6.如權(quán)利要求2所述的三維激光切割頭隨動(dòng)裝置,其特征在于,所述同步帶惰輪安裝在力矩電機(jī)水冷外殼上。
7.如權(quán)利要求1所述的三維激光切割頭隨動(dòng)裝置,其特征在于,所述距離檢測(cè)器為電容開關(guān)。
8.如權(quán)利要求2所述的三維激光切割頭隨動(dòng)裝置,其特征在于,所述力矩電機(jī)的輸出端通過傳動(dòng)軸與同步帶輪連接。
9.如權(quán)利要求8所述的三維激光切割頭隨動(dòng)裝置,其特征在于,還包括圓形光柵,所述圓形光柵設(shè)置在所述傳動(dòng)軸上。
10.如權(quán)利要求9所述的三維激光切割頭隨動(dòng)裝置,其特征在于,還包括控制系統(tǒng),所述距離檢測(cè)器與控制系統(tǒng)連接,控制系統(tǒng)與力矩電機(jī)連接,圓形光柵與控制系統(tǒng)連接。
一種三維激光切割頭隨動(dòng)裝置
技術(shù)領(lǐng)域
本發(fā)明涉及激光切割技術(shù)領(lǐng)域,尤其涉及一種三維激光切割頭隨動(dòng)裝置。
背景技術(shù)
目前,現(xiàn)有技術(shù)中,激光切割加工技術(shù)作為最先進(jìn)的加工制造技術(shù)之一,具有高精度、高適應(yīng)性、高效率等優(yōu)點(diǎn),已被廣泛應(yīng)用于機(jī)械加工領(lǐng)域,隨著應(yīng)用的深入,簡(jiǎn)單的平面類和管類零件切割已經(jīng)無法滿足加工需求,而三維激光切割因其能滿足復(fù)雜曲面類零件的加工,被廣泛應(yīng)用于航空航天、汽車制造等領(lǐng)域。三維激光切割在加工過程中工件固定不動(dòng),依靠激光切割頭的運(yùn)動(dòng)完成切割。典型的三維激光切割設(shè)備采用五軸聯(lián)動(dòng),由XYZ三個(gè)直線運(yùn)動(dòng)軸與激光切割頭自身的C軸旋轉(zhuǎn)和B軸擺轉(zhuǎn)組成,以實(shí)現(xiàn)切割嘴在切割過程中始終保持與工件表面的垂直,也就是激光的出光方向與工件表面垂直。在切割過程中,噴嘴與工件表面的距離需要始終保持恒定,該距離一般為0.5mm至10mm之間,只有合適的距離才能充分發(fā)揮切割效率,否則會(huì)使切割效率和切割質(zhì)量下降。然而,對(duì)于大型復(fù)雜曲面薄板類零件,其自身的變形無法很好的控制,噴嘴與工件表面的距離需要實(shí)時(shí)調(diào)整才能滿足距離恒定的要求。所以,在三維激光切割頭噴嘴處需增加一組隨動(dòng)裝置,該裝置由傳感器和執(zhí)行機(jī)構(gòu)組成,可帶動(dòng)噴嘴做直線運(yùn)動(dòng),使噴嘴與工件的距離始終恒定。由于激光切割具有高速度、高精度等特點(diǎn),所以要求隨動(dòng)裝置必須具有很高的響應(yīng)速度。目前隨動(dòng)裝置的傳感器為電容開關(guān),可實(shí)時(shí)反饋距離信號(hào)。執(zhí)行機(jī)構(gòu)采用直線導(dǎo)軌和滾珠絲杠的結(jié)構(gòu),由伺服電機(jī)驅(qū)動(dòng),可帶動(dòng)噴嘴進(jìn)行直線運(yùn)動(dòng),從而達(dá)到隨動(dòng)的目的。
然而,現(xiàn)有隨動(dòng)調(diào)高裝置采用伺服電機(jī)驅(qū)動(dòng)滾珠絲杠,帶動(dòng)噴嘴沿直線導(dǎo)軌完成直線運(yùn)動(dòng),由此實(shí)現(xiàn)隨動(dòng)調(diào)高,這種方式結(jié)構(gòu)復(fù)雜,絲杠、絲母占用空間較大,不利于縮小隨動(dòng)組件的整體尺寸,對(duì)裝配精度要求較高,而且后期還需對(duì)絲杠絲母進(jìn)行定期維護(hù)。
因此,需要提供一種新型的三維激光切割頭隨動(dòng)裝置。
發(fā)明內(nèi)容
(一)要解決的技術(shù)問題
本發(fā)明要解決的技術(shù)問題是提供一種三維激光切割頭隨動(dòng)裝置,以解決現(xiàn)有隨動(dòng)結(jié)構(gòu)隨動(dòng)響應(yīng)速度慢、結(jié)構(gòu)復(fù)雜、占用空間大、制造不便、對(duì)安裝精度要求高的問題。
(二)技術(shù)方案
為解決上述技術(shù)問題,本發(fā)明提供的三維激光切割頭隨動(dòng)裝置包括驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座、直線導(dǎo)軌副、滑動(dòng)組件、距離檢測(cè)器、同步帶輪、同步帶惰輪及同步帶;驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座均安裝在三維切割頭擺動(dòng)軸上,直線導(dǎo)軌副固定在直線導(dǎo)軌副安裝座上,滑動(dòng)組件可滑動(dòng)地設(shè)置在直線導(dǎo)軌副上;驅(qū)動(dòng)電機(jī)的輸出端與同步帶輪連接,同步帶環(huán)繞于同步帶輪和同步帶惰輪上;滑動(dòng)組件與同步帶連接,且在同步帶的帶動(dòng)下做直線運(yùn)動(dòng);滑動(dòng)組件的下端與距離檢測(cè)器連接。
其中,還包括力矩電機(jī)水冷外殼,所述驅(qū)動(dòng)電機(jī)為力矩電機(jī),力矩電機(jī)和直線導(dǎo)軌副安裝座通過力矩電機(jī)水冷外殼安裝在三維切割頭擺動(dòng)軸上。
其中,所述滑動(dòng)組件包括左滑動(dòng)單元和右滑動(dòng)單元,左滑動(dòng)單元和右滑動(dòng)單元的下端固定連接有安裝基板,所述距離檢測(cè)器設(shè)置在安裝基板的下方。
其中,所述同步帶為開環(huán)同步帶,所述同步帶的兩個(gè)移動(dòng)端分別與所述左滑動(dòng)單元和右滑動(dòng)單元連接。
其中,所述同步帶呈“S”環(huán)繞在同步帶輪和同步帶惰輪上,在力矩電機(jī)的驅(qū)動(dòng)下,同步帶的兩個(gè)移動(dòng)端同時(shí)朝向一個(gè)方向移動(dòng),以帶動(dòng)左滑動(dòng)單元和右滑動(dòng)單元同時(shí)直線移動(dòng)。
其中,所述同步帶惰輪安裝在力矩電機(jī)水冷外殼上。
其中,所述距離檢測(cè)器為電容開關(guān)。
其中,所述力矩電機(jī)的輸出端通過傳動(dòng)軸與同步帶輪連接。
其中,還包括圓形光柵,所述圓形光柵設(shè)置在所述傳動(dòng)軸上。
其中,還包括控制系統(tǒng),所述距離檢測(cè)器與控制系統(tǒng)連接,控制系統(tǒng)與力矩電機(jī)連接,圓形光柵與控制系統(tǒng)連接。
(三)有益效果
本發(fā)明的上述技術(shù)方案具有如下優(yōu)點(diǎn):
本發(fā)明提供的技術(shù)方案中,通過驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座均安裝在三維切割頭擺動(dòng)軸上,隨動(dòng)裝置整體由三維切割頭擺動(dòng)軸驅(qū)動(dòng);通過直線導(dǎo)軌副,滑動(dòng)組件上下可滑動(dòng),進(jìn)而帶動(dòng)距離檢測(cè)器上下移動(dòng),距離檢測(cè)器用于檢測(cè)噴嘴距離工件表面的距離,進(jìn)而噴嘴與工件表面的距離可實(shí)時(shí)調(diào)整,滑動(dòng)組件上下滑動(dòng)為通過同步帶的帶動(dòng)做直線運(yùn)動(dòng),由于激光切割具有高速度、高精度等特點(diǎn),所以要求隨動(dòng)裝置必須具有很高的響應(yīng)速度,通過距離檢測(cè)器和噴嘴在同步帶的帶動(dòng)下延直線導(dǎo)軌做直線運(yùn)動(dòng),以實(shí)現(xiàn)隨動(dòng)調(diào)高,這種方式中同步帶輪的結(jié)構(gòu),自身的重量較輕,可降低自身的運(yùn)動(dòng)慣量,提高其響應(yīng)速度,且整體結(jié)構(gòu)簡(jiǎn)單,緊湊,制造方便,對(duì)安裝精度要求不高,且終身免于維護(hù);該發(fā)明結(jié)構(gòu)緊湊,可靠性高,成本低,可提高隨動(dòng)調(diào)高運(yùn)動(dòng)的響應(yīng)速度和定位精度,也可免去滾珠絲杠后期維護(hù)成本,避免傳統(tǒng)方式中滾珠絲杠潤(rùn)滑油脂污染切割頭內(nèi)部光路。
附圖說明
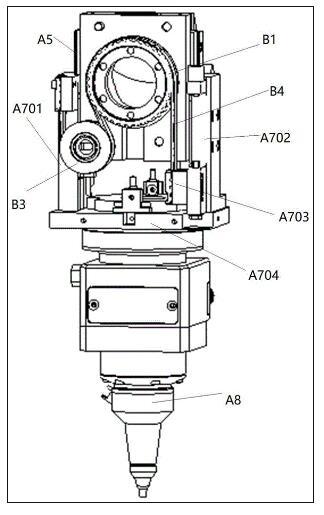
圖1為本發(fā)明三維激光切割頭隨動(dòng)裝置的立體裝配結(jié)構(gòu)示意圖;
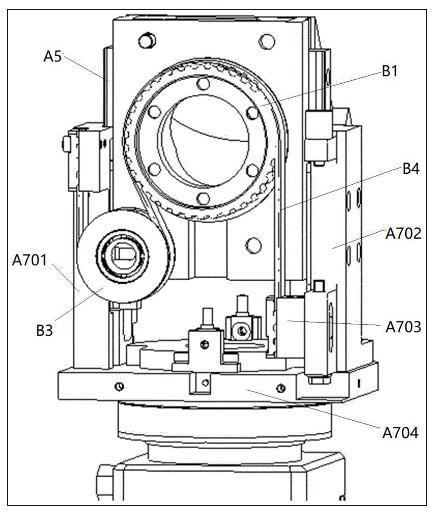
圖2為本發(fā)明三維激光切割頭隨動(dòng)裝置的側(cè)面結(jié)構(gòu)示意圖;
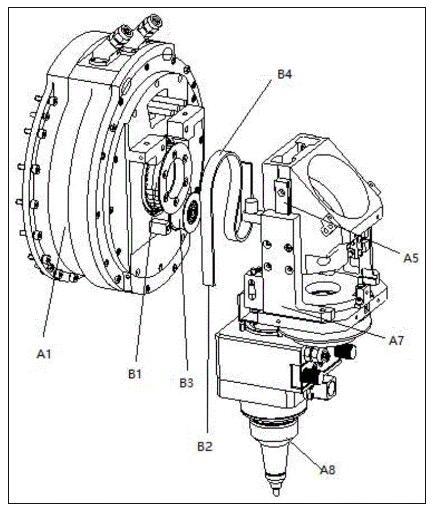
圖3為本發(fā)明三維激光切割頭隨動(dòng)裝置的正面結(jié)構(gòu)示意圖;
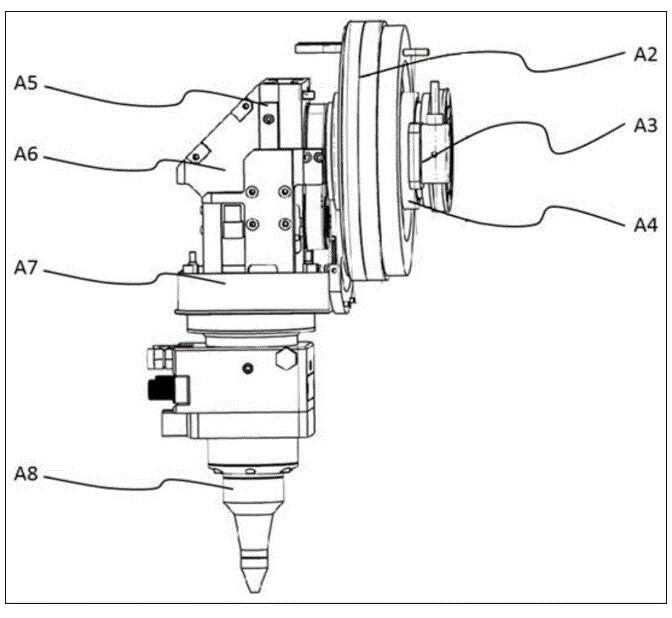
圖4為本發(fā)明三維激光切割頭隨動(dòng)裝置的正面局部結(jié)構(gòu)示意圖。
圖中:A1:力矩電機(jī)水冷外殼,A2:力矩電機(jī),A3:圓形光柵,A4:傳動(dòng)軸,A5:直線導(dǎo)軌副,A6:直線導(dǎo)軌副安裝座,A7:滑動(dòng)組件,A8:電容開關(guān),B1:同步帶輪,B2:同步帶移動(dòng)端,B3:同步帶惰輪,B4:同步帶,A701:左滑動(dòng)單元,A702:右滑動(dòng)單元,A703:同步帶壓板,A704:安裝基板。
具體實(shí)施方式
下面結(jié)合附圖和實(shí)施例,對(duì)本發(fā)明的具體實(shí)施方式作進(jìn)一步詳細(xì)描述。以下實(shí)施例用于說明本發(fā)明,但不用來限制本發(fā)明的范圍。
本發(fā)明的描述中,需要理解的是,術(shù)語“中心”、“縱向”、“橫向”、“上”、“下”、“前”、“后”、“左”、“右”、“豎直”、“水平”、“頂”、“底”“內(nèi)”、“外”等指示的方位或位置關(guān)系為基于附圖所示的方位或位置關(guān)系,僅是為了便于描述本發(fā)明和簡(jiǎn)化描述,而不是指示或暗示所指的裝置或元件必須具有特定的方位、以特定的方位構(gòu)造和操作,因此不能理解為對(duì)本發(fā)明的限制。此外,術(shù)語“第一”、“第二”僅用于描述目的,而不能理解為指示或暗示相對(duì)重要性。
在本發(fā)明的描述中,需要說明的是,除非另有明確的規(guī)定和限定,術(shù)語“安裝”、“相連”、“連接”應(yīng)做廣義理解,例如,可以是固定連接,也可以是可拆卸連接,或一體地連接;可以是機(jī)械連接,也可以是電連接;可以是直接相連,也可以通過中間媒介間接相連,可以是兩個(gè)元件內(nèi)部的連通。對(duì)于本領(lǐng)域的普通技術(shù)人員而言,可以具體情況理解上述術(shù)語在本發(fā)明中的具體含義。
如圖1-圖4是本發(fā)明實(shí)施例提供的三維激光切割頭隨動(dòng)裝置包括驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座A6、直線導(dǎo)軌副A5、滑動(dòng)組件A7、距離檢測(cè)器、同步帶輪B1、同步帶惰輪B3及同步帶B4;驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座均安裝在三維切割頭擺動(dòng)軸上,直線導(dǎo)軌副固定在直線導(dǎo)軌副安裝座上,滑動(dòng)組件可滑動(dòng)地設(shè)置在直線導(dǎo)軌副上;驅(qū)動(dòng)電機(jī)的輸出端與同步帶輪連接,同步帶環(huán)繞于同步帶輪和同步帶惰輪上;滑動(dòng)組件與同步帶連接,且在同步帶的帶動(dòng)下做直線運(yùn)動(dòng);滑動(dòng)組件的下端與距離檢測(cè)器連接。
上述實(shí)施例中,通過驅(qū)動(dòng)電機(jī)、直線導(dǎo)軌副安裝座均安裝在三維切割頭擺動(dòng)軸上,隨動(dòng)裝置整體由三維切割頭擺動(dòng)軸驅(qū)動(dòng);通過直線導(dǎo)軌副,滑動(dòng)組件上下可滑動(dòng),進(jìn)而帶動(dòng)距離檢測(cè)器上下移動(dòng),距離檢測(cè)器用于檢測(cè)噴嘴距離工件表面的距離,進(jìn)而噴嘴與工件表面的距離可實(shí)時(shí)調(diào)整,滑動(dòng)組件上下滑動(dòng)為通過同步帶的帶動(dòng)做直線運(yùn)動(dòng),由于激光切割具有高速度、高精度等特點(diǎn),所以要求隨動(dòng)裝置必須具有很高的響應(yīng)速度,通過距離檢測(cè)器和噴嘴在同步帶的帶動(dòng)下延直線導(dǎo)軌做直線運(yùn)動(dòng),以實(shí)現(xiàn)隨動(dòng)調(diào)高,這種方式中同步帶輪的結(jié)構(gòu),自身的重量較輕,可降低自身的運(yùn)動(dòng)慣量,提高其響應(yīng)速度,且整體結(jié)構(gòu)簡(jiǎn)單,緊湊,制造方便,對(duì)安裝精度要求不高,且終身免于維護(hù)。
具體地,還包括力矩電機(jī)水冷外殼A1,所述驅(qū)動(dòng)電機(jī)為力矩電機(jī)A2,力矩電機(jī)和直線導(dǎo)軌副安裝座通過力矩電機(jī)水冷外殼安裝在三維切割頭擺動(dòng)軸上。通過力矩電機(jī)水冷外殼,一方面冷卻電機(jī),另一方面可為力矩電機(jī)和直線導(dǎo)軌副安裝座提供安裝支撐。
具體地,所述滑動(dòng)組件包括左滑動(dòng)單元A701和右滑動(dòng)單元A702,左滑動(dòng)單元和右滑動(dòng)單元的下端固定連接有安裝基板A704,所述距離檢測(cè)器設(shè)置在安裝基板的下方;左滑動(dòng)單元和右滑動(dòng)單元左右分居設(shè)置,結(jié)構(gòu)更精巧和平衡,重量更輕便,運(yùn)動(dòng)更平穩(wěn)。
優(yōu)選地,所述同步帶為開環(huán)同步帶,開環(huán)同步帶具有同步帶移動(dòng)端B2,所述同步帶的兩個(gè)移動(dòng)端分別與所述左滑動(dòng)單元和右滑動(dòng)單元連接;優(yōu)選地,本申請(qǐng)同步帶配備有同步帶壓板A703。本申請(qǐng)優(yōu)選為開環(huán)同步帶,同步帶的兩個(gè)移動(dòng)端分別與所述左滑動(dòng)單元和右滑動(dòng)單元,傳動(dòng)更便捷平穩(wěn)。
具體地,打破常規(guī)思維,將同步帶呈“S”環(huán)繞在同步帶輪和同步帶惰輪上,在力矩電機(jī)的驅(qū)動(dòng)下,同步帶的兩個(gè)移動(dòng)端同時(shí)朝向一個(gè)方向移動(dòng),以帶動(dòng)左滑動(dòng)單元和右滑動(dòng)單元同時(shí)直線移動(dòng)。
具體地,所述同步帶惰輪安裝在力矩電機(jī)水冷外殼上。同步帶惰輪作為從動(dòng)輪。
具體他,距離檢測(cè)器為電容開關(guān)A8。通過電容開關(guān),可實(shí)時(shí)反饋距離信號(hào)。
具體地,力矩電機(jī)的輸出端通過傳動(dòng)軸A4與同步帶輪連接。優(yōu)選地,還包括圓形光柵A3,所述圓形光柵設(shè)置在所述傳動(dòng)軸上,圓形光柵作為旋轉(zhuǎn)編碼器,可實(shí)時(shí)反饋傳動(dòng)軸的角度信號(hào)。
具體地,還包括控制系統(tǒng),所述距離檢測(cè)器與控制系統(tǒng)連接,控制系統(tǒng)與力矩電機(jī)連接,圓形光柵與控制系統(tǒng)連接。隨動(dòng)功能開啟后,電容開關(guān)檢測(cè)噴嘴距離工件表面的距離,將信號(hào)傳遞給控制系統(tǒng),控制系統(tǒng)驅(qū)動(dòng)力矩電機(jī),在力矩電機(jī)的驅(qū)動(dòng)下,傳動(dòng)軸帶動(dòng)同步帶輪一起旋轉(zhuǎn),同步帶將同步帶輪的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為直線運(yùn)動(dòng),在直線導(dǎo)軌副的作用下,同步帶移動(dòng)端發(fā)生直線運(yùn)動(dòng)。滑動(dòng)組件在同步帶移動(dòng)端的帶動(dòng)下可實(shí)現(xiàn)隨動(dòng)運(yùn)動(dòng);圓形光柵與控制系統(tǒng)連接,對(duì)旋轉(zhuǎn)精度進(jìn)行閉環(huán)反饋。
為了進(jìn)一步理解本申請(qǐng)的技術(shù)方案,結(jié)合附圖,通過以下實(shí)施例進(jìn)行詳細(xì)說明。
如圖2、圖3和圖4所示,力矩電機(jī)水冷外殼A1與三維切割頭擺動(dòng)軸端面固定,力矩電機(jī)A2固定在力矩電機(jī)水冷外殼A1中,傳動(dòng)軸A4與力矩電機(jī)轉(zhuǎn)子連接,在轉(zhuǎn)子的帶動(dòng)下做旋轉(zhuǎn)運(yùn)動(dòng)。圓形光柵A3與傳動(dòng)軸A4連接,可實(shí)時(shí)反饋傳動(dòng)軸A4的角度信號(hào)。直線導(dǎo)軌副安裝座A6與力矩電機(jī)水冷外殼A1固定,直線導(dǎo)軌副A5固定在直線導(dǎo)軌副安裝座A6上,滑動(dòng)組件A7與直線導(dǎo)軌副A5上的滑塊固定,做直線運(yùn)動(dòng)。電容開關(guān)A8位于滑動(dòng)組件A7最下端,可實(shí)時(shí)反饋噴嘴與工件之間的距離。B1為同步帶輪,B2為同步帶移動(dòng)端,B3為同步帶惰輪,B4為同步帶。同步帶輪B1與傳動(dòng)軸A4連接。同步帶B4環(huán)繞于同步帶輪B1和同步帶惰輪B3上,同步帶移動(dòng)端B2固定在滑動(dòng)組件A7上,當(dāng)同步帶輪B1轉(zhuǎn)動(dòng)時(shí),同步帶移動(dòng)端B2可帶動(dòng)滑動(dòng)組件A7做直線運(yùn)動(dòng)。
上述實(shí)施例提供的方案中調(diào)整及工作過程:隨動(dòng)功能開啟后,電容開關(guān)A8檢測(cè)噴嘴距離工件表面的距離,將信號(hào)傳遞給控制系統(tǒng),控制系統(tǒng)驅(qū)動(dòng)力矩電機(jī)A2,在力矩電機(jī)的驅(qū)動(dòng)下,傳動(dòng)軸A4帶動(dòng)同步帶輪B1一起旋轉(zhuǎn),同步帶B4將同步帶輪B1的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為直線運(yùn)動(dòng),在直線導(dǎo)軌副A5的作用下,同步帶移動(dòng)端B2發(fā)生直線運(yùn)動(dòng)。滑動(dòng)組件A7在同步帶移動(dòng)端B2的帶動(dòng)下可實(shí)現(xiàn)隨動(dòng)運(yùn)動(dòng)。圓形光柵A3對(duì)旋轉(zhuǎn)精度進(jìn)行閉環(huán)反饋。
綜上所述,本發(fā)明采用力矩電機(jī)和旋轉(zhuǎn)編碼器作為隨動(dòng)動(dòng)力的輸入,力矩電機(jī)驅(qū)動(dòng)同步帶輪旋轉(zhuǎn),同步帶輪帶動(dòng)同步帶將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為直線運(yùn)動(dòng),噴嘴在同步帶的帶動(dòng)下延直線導(dǎo)軌做直線運(yùn)動(dòng),以實(shí)現(xiàn)隨動(dòng)調(diào)高。這種方式結(jié)構(gòu)簡(jiǎn)單,緊湊,制造方便,對(duì)安裝精度要求不高,且終身免于維護(hù)。此外同步帶輪的結(jié)構(gòu)較絲杠比,其自身的重量較輕,可降低自身的運(yùn)動(dòng)慣量,提高其響應(yīng)速度。
以上所述僅是本發(fā)明的優(yōu)選實(shí)施方式,應(yīng)當(dāng)指出,對(duì)于本技術(shù)領(lǐng)域的普通技術(shù)人員來說,在不脫離本發(fā)明技術(shù)原理的前提下,還可以做出若干改進(jìn)和變型,這些改進(jìn)和變型也應(yīng)視為本發(fā)明的保護(hù)范圍。
推薦新聞

© 2022 寧波鄞州蓋奇同步帶輪有限公司 版權(quán)所有 浙ICP備09102982號(hào)-2  浙公網(wǎng)安備33021202003319號(hào) 網(wǎng)站建設(shè):中企動(dòng)力 寧波 SEO
浙公網(wǎng)安備33021202003319號(hào) 網(wǎng)站建設(shè):中企動(dòng)力 寧波 SEO
咨詢
E-mail
二維碼
手機(jī)瀏覽

- TOP